Given implementation of hunt and kill algorithm works on already defined grid with all cells separated by walls.
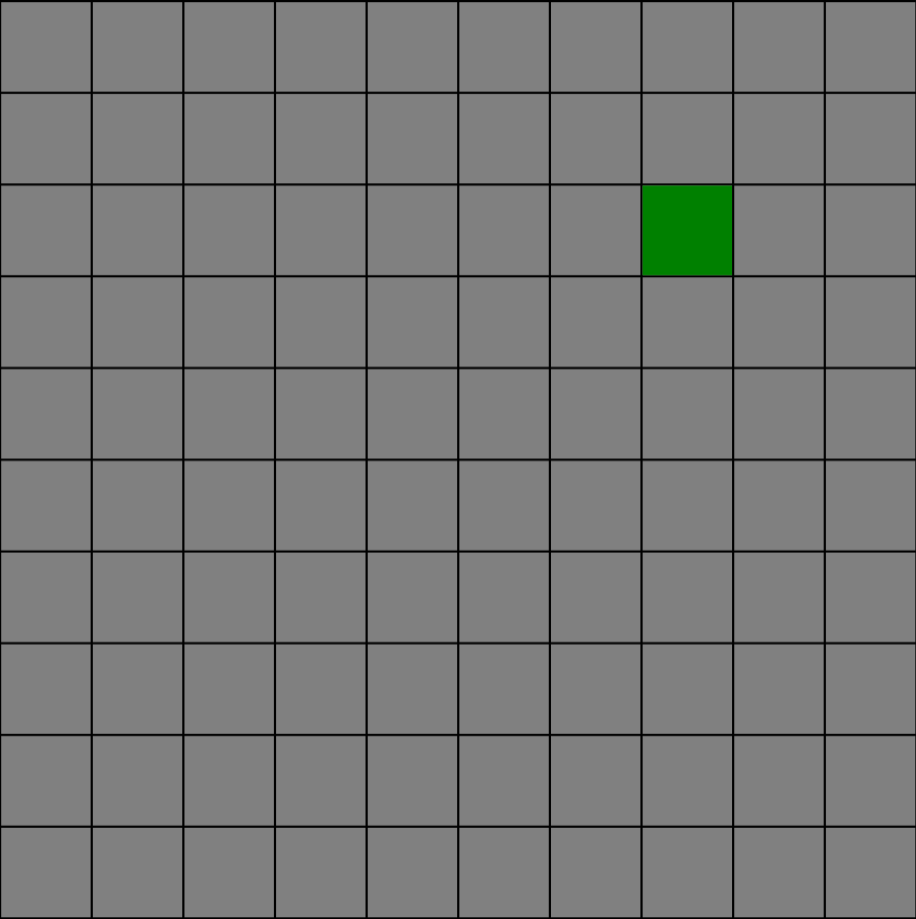
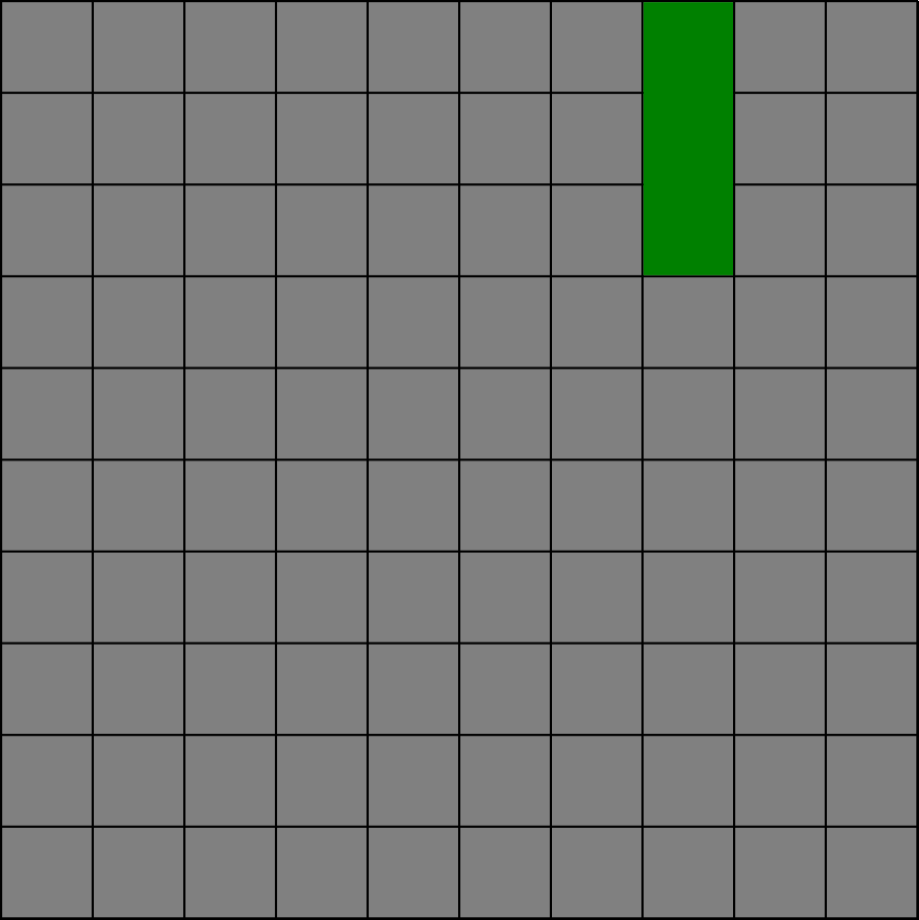
The initial concept is similar to the depth first search method. Algorithm starts from selecting random cell on the gird, marking it as visited and trying to move from it in random direction.
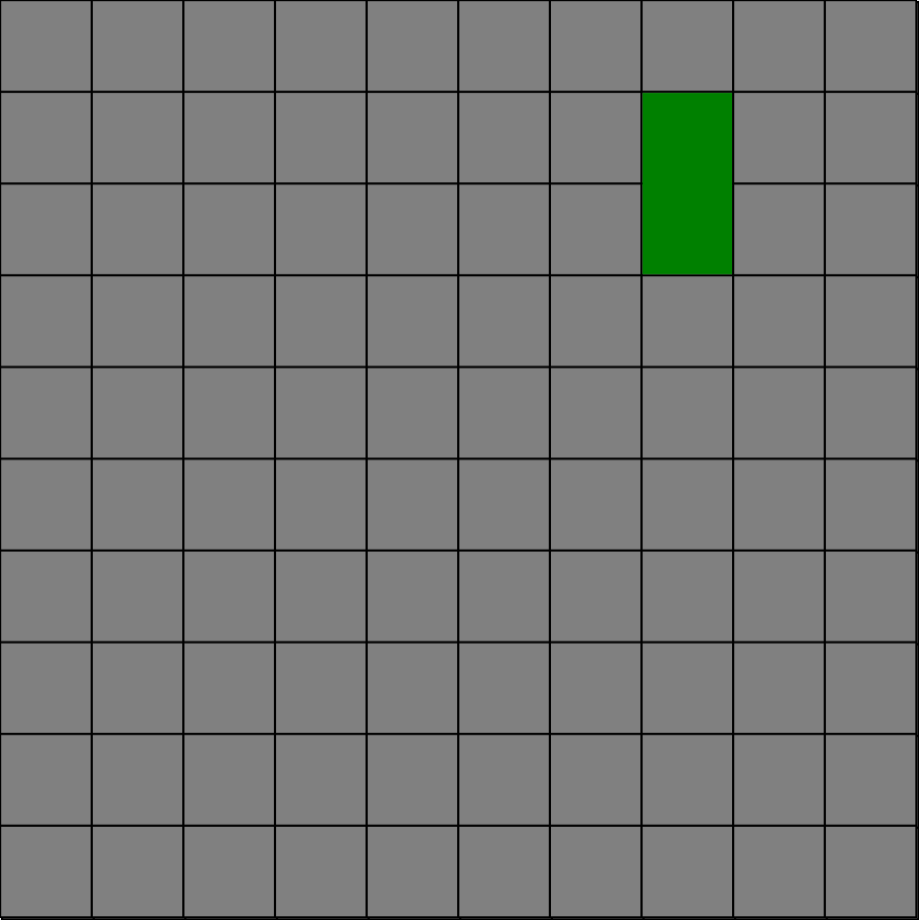
If there is a non visited cell in the given direction we built the passage. In the example presented below the north got selected as random direction. The neighbouring cell has not been visited yet and is located withing the bound of the maze. We need to mark it as visited and set as current cell.
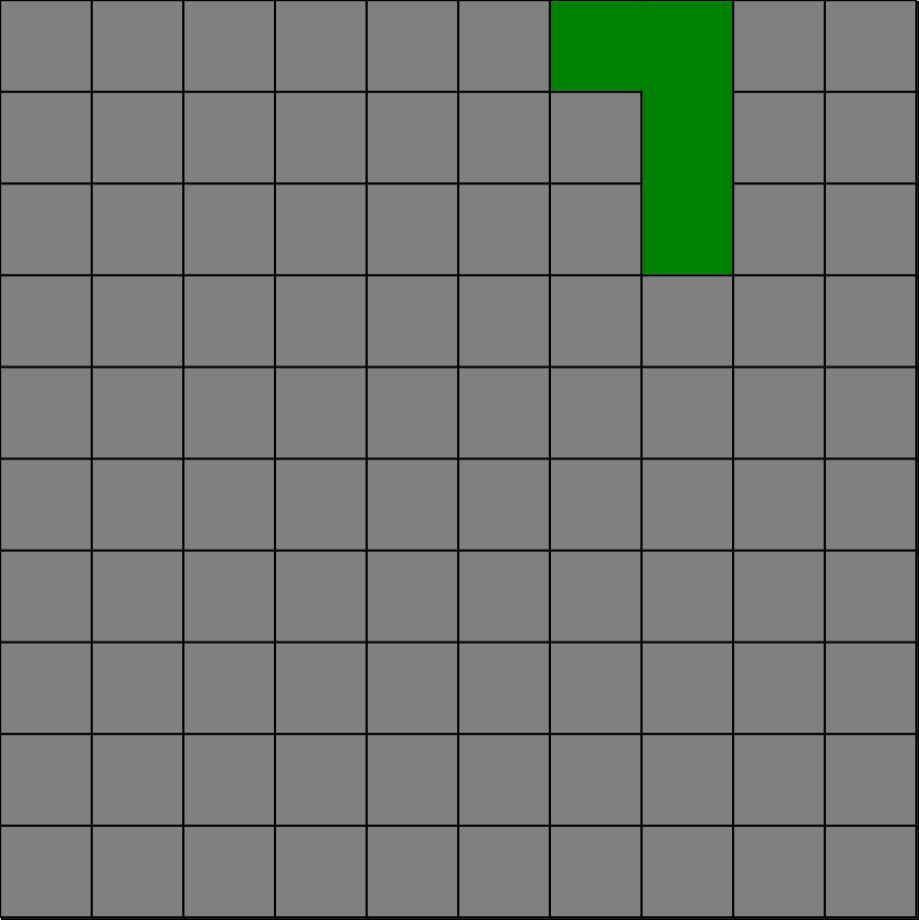
In the third step the north got selected again.
The same process is followed for the fourth iteration. Overall we can move in four directions. Imagine case where directions got randomly shuffled in the following order [North, South, West, East]. When checking the path for north the neighbouring cell would be located outside the bound of the maze, so we have to skip this direction. The next one is south, in this case we reach out the cell which has been already visited, in this case we also have to skip building the passage. Checking the west we have made sure that it is located within the grid and was not visited yet. We build the passage to this cell, mark it as visited and skip check for the east.
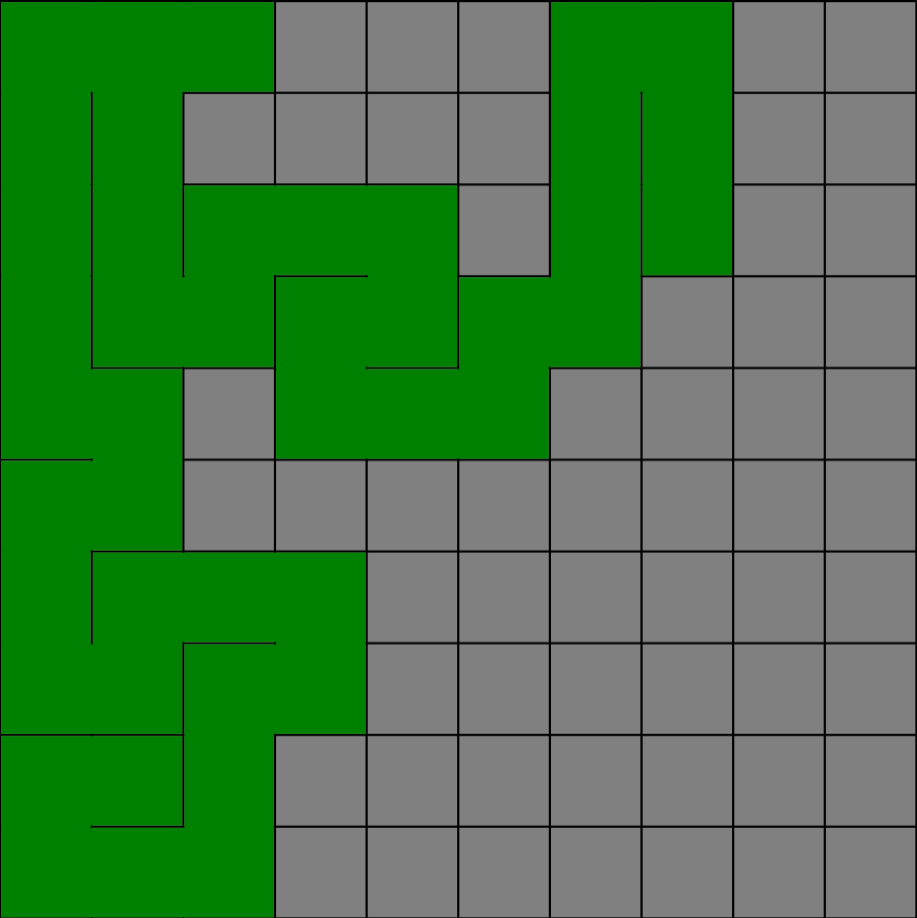
As we can see with the next iterations the path is almost reaching its dead end. Right now following the algorithm the path would be build only on the north and then east as for other directions conditions will not be met.
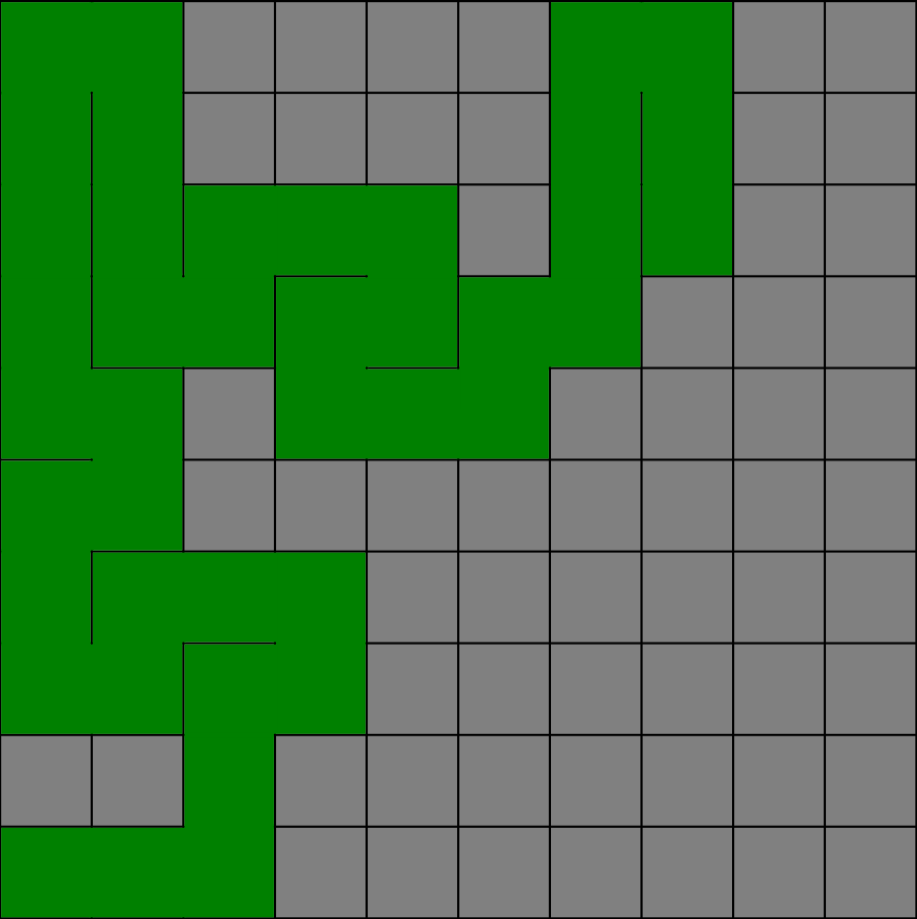
Here we are, the first path reached the dead end. It means that the walk phase has been completed and we need to start the hunt.
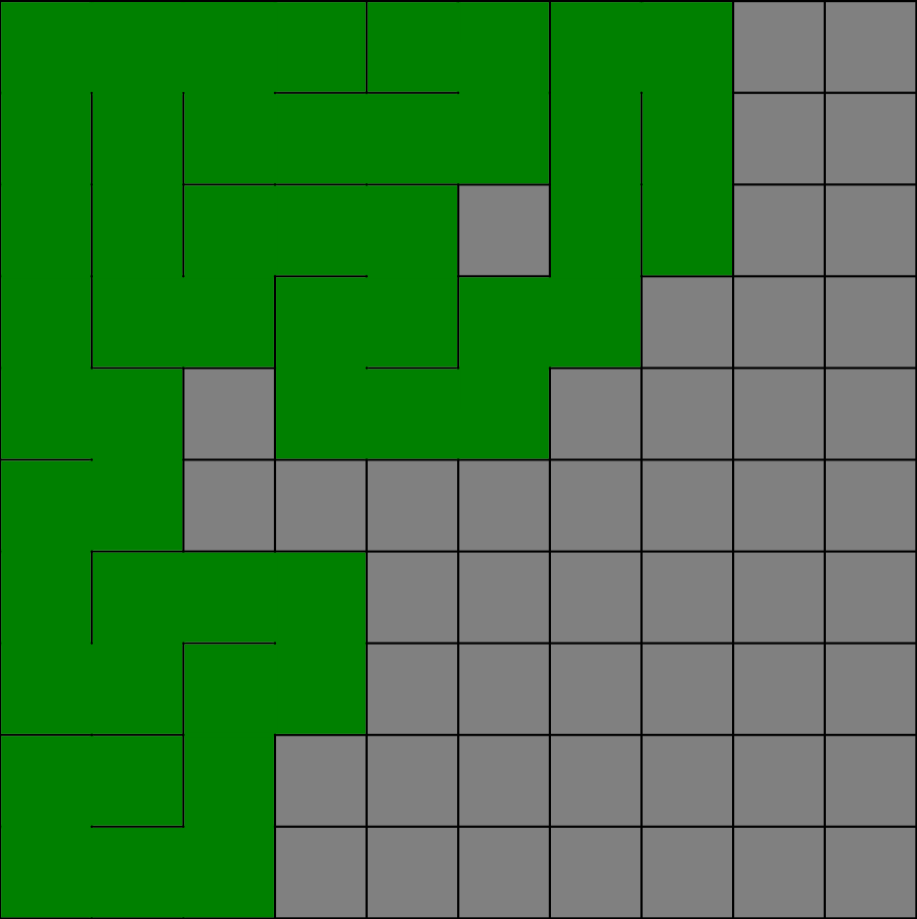
During the hunt going row by row and column by column we are looking for a first non visited cell which is directly adjacent to the already generated path. If we manage to find the cell then we build the passage to it and mark it as visited.
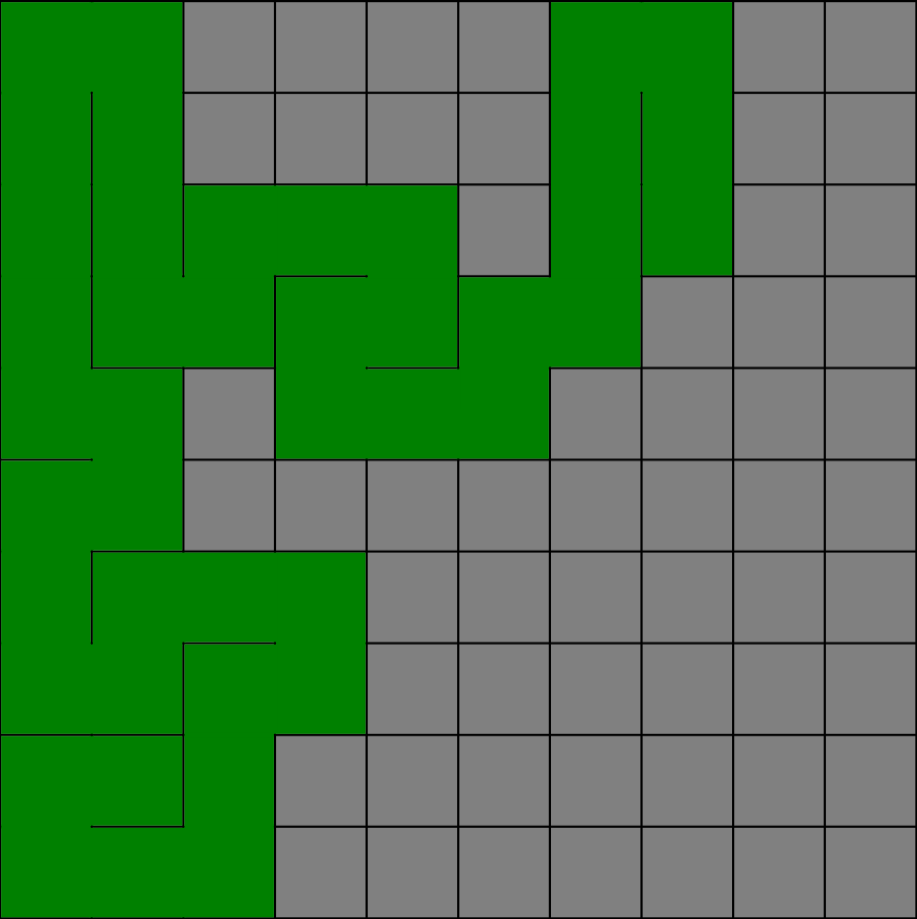
Right now this cell is the starting point for the walk phase. Again we shuffle the directions and try to build the passages following the rule where neighbour has to be located inside the maze and must not be visited yet. When the path reaches the dead end the hunt starts again.
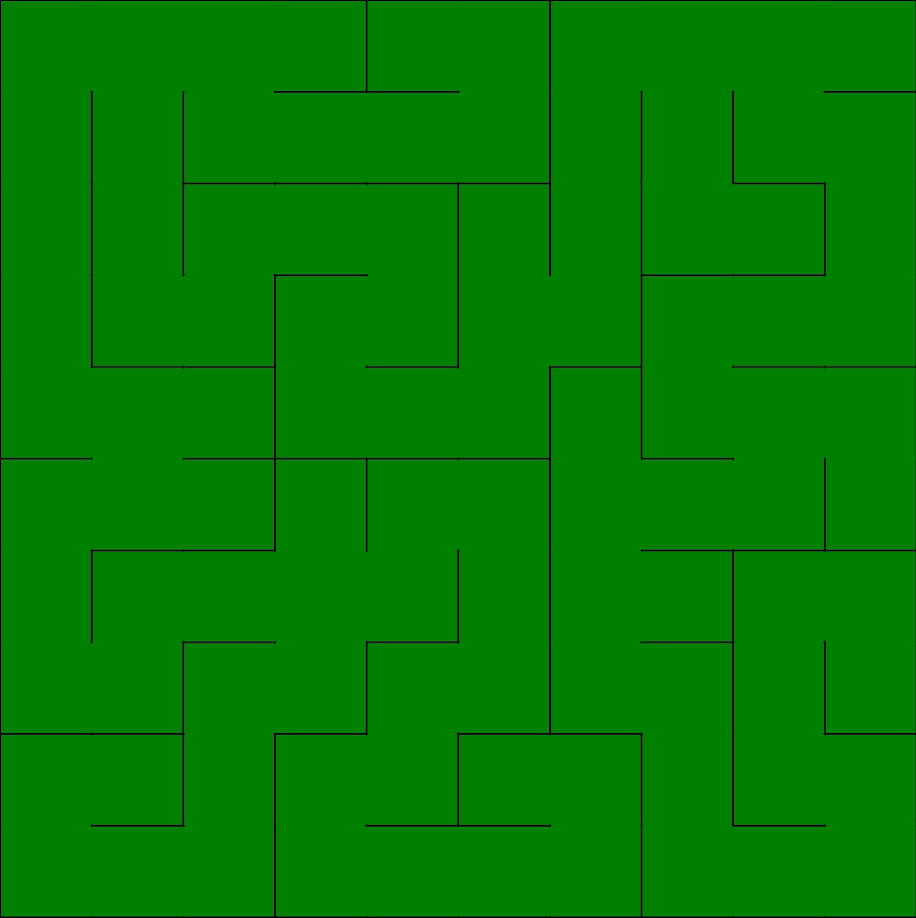
The algorithm is executed until there is no cell remaining for the hunt phase. All of them have been visited and the maze has been successfully generated.